
ROEMHELD FSS clamping systems
Flexible Clamping and Supporting Systems
These systems are also known as: Universal Holding Fixture = UHF Fixture
To machine free-form parts, workpiece-specific clamping fixtures are used in most cases, i.e. fixtures designed to a very specific workpiece geometry.
In order to position or to clamp a different workpiece, the entire fixture must be exchanged.
The result is an increasing number of fixtures, that corresponds to the variety of different components.And this in return does not only increase the costs for production and construction of clamping fixtures but also for storing, setup and logistics.
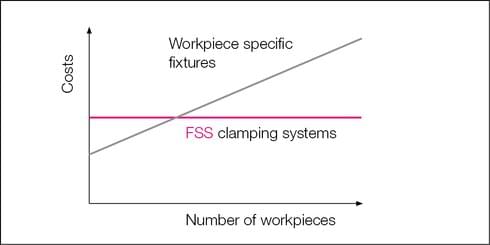
FSS clamping systems are used to clamp and support various workpieces with different free-form surfaces.
The core elements of a FSS clamping system are the RVA ROEMHELD vacuum actuators that can be used in unlimited quantity and that together form the contact surface of the workpiece.
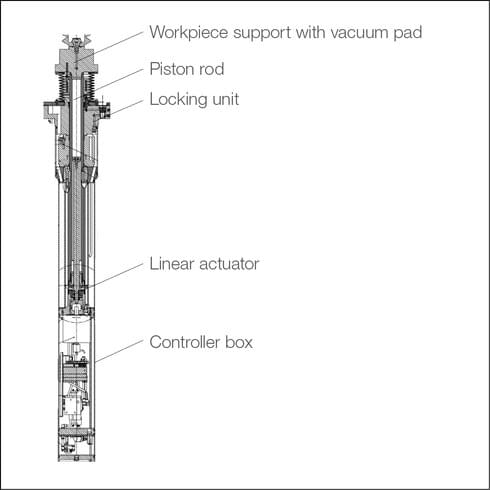
Since each RVA element can be positioned individually on the relevant workpiece geometry, FSS clamping systems allow for a flexible configuration of individual surfaces to clamp and support workpieces. RVA ROEMHELD vacuum actuators consist of a guided and axially adjustable piston rod, that can be clamped via a locking unit in any position. Both the procedure itself as well as the clamping of the piston rods are fully automated. This is the reason why FSS clamping fixtures are in general permanently installed in the machine tool.
In general, a vacuum pad with internal ball location that has well proven itself as a defined contact surface is used as the interface to the workpiece. Other fixture geometries geared to the individual workpieces are also possible. Depending on the workpiece surface and geometry as well as the vacuum pads, clamping forces (vacuum forces) of 300 N per RVA element and above can be obtained.
Positioning the actuators and triggering of functions such as vacuum on/off, air cushion on/off, cleaning air on/off is controlled by the NC control of the machine tool via the PLC using the PROFINET ® communication protocol.


FSS clamping systems are used everywhere where thin-walled parts with large-area free form surfaces have to be machined or positioned in measuring machines.
• Aviation industry
• Automotive industry
• Railed vehicles
• Boat building
• Aerospace industry

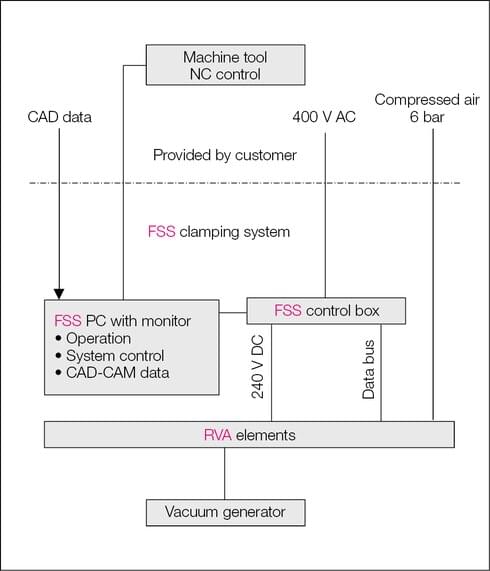
To move the piston rod, the RVA elements need a power supply of 24 to 36 V DC, a pneumatic supply of 6 bar ensuring the unclamping of the piston and a connection to a vacuum generator supplying the vacuum pads of the workpiece supports.
The RVA elements are activated by a data bus.
The FSS clamping system is controlled by a central PC using the required switching devices that are integrated into a control box. The PC is equipped with the required bus interfaces. The controller is able to process Siemens PROFINET ® or other bus commands.
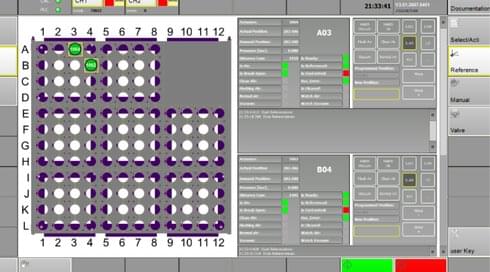
A touch monitor is used to execute the functions of the ROEMHELD FSS clamping system. The monitor shows the operator the status of the system, including current messages.
This HMI enables various functions to be performed in manual mode and in set-up mode, including:
• Individual or group selection of actuators
• Reference travel
• Moving into position
• Driving in inching mode
• Vacuum on/off
• Air cushion on/off
• Cleaning air on/off
We plan and design FSS clamping fixtures based on customer-specific workpieces and applications. In cooperation with the customer and, if necessary, the machine tool manufacturer we determine the optimum dimensioning, equipment and functionality of the FSS clamping systems.
The FSS control system is able to process CNC/PLC commands and move to the required Z positions. In addition, the FSS control system continuously reports the status of the clamping systems back to the machine tool.
We deliver complete, but also individual FSS clamping system components. This includes installation, start up and the required integration into the NC control of the machine tool to ensure that your manufacturing system runs smoothly and reliably.
Beckhoff Automation GmbH, www.beckhoff.com/en-gb/
Working together in partnership, Beckhoff has developed an efficient control concept for ROEMHELD and delivers the corresponding components and systems.
Local service is available thanks to Beckhoff’s global presence.
ROEMHELD vacuum actuators consist of a guided and axially adjustable piston rod, that can be clamped via a locking unit in any position. The support plunger is clamped by spring force clamping and released by compressed air. In general, a vacuum pad with internal ball location that has well proven itself as a
defined contact surface is used as the interface to the workpiece.
The geometry and rigidity of the pads can be selected depending on the workpieces' material and surface structure. Active elements are equipped with a controlled drive.
Piston rod diameter and stroke lengths can be tailored to the workpieces and/or customer requirements. Piston rod diameters of 50 mm and stroke lengths of up to 1,000 mm are possible.
Technical data
Piston rod diameter: 50 mm
Strokes: 100 to 1,000 mm
Lifting speed (active RVA): Up to 30 mm/s (higher speeds possible)
Positioning accuracy (stroke): Up to ± 0.05 mm possible
Repeatability (stroke): Up to ± 0.02 mm possible
Holding forces vacuum pad: Up to 300 N (higher forces possible)
Possible axial support force (static): 1.2 to 12 kN
Possible axial force (dynamic): Approx. 1.0 kN (higher forces possible)

Flat pendulum workpiece support with vacuum pad (workpiece-specific)
The efficiency and safety of clamping depends primarily on the design of the interface between workpiece and piston rod. The material composition and rigidity of the workpieces, their convex or concave curvature, the type of machining as well as the pressure sensitivity of the surfaces are decisive for the selection of the vacuum pads and for the design of the workpiece supports.
Locking unit
The locking unit is used to clamp the piston rod and to transmit the load itself to the housing.
Linear actuator
This linear drive consists of a stepping or servo motor driving a trapezoidal spindle or ball screw, and depending on its type, consists of a gear. The dimensioning of the linear drive depends on whether the piston rod must only be moved or if it must also apply forces to the workpiece. It is regulated by means of an encoder attached to the motor.
Depending on the required transmission, different gears may be used. The required precision, displacement speed and maximum static and dynamic load are criteria for the correct selection.
Cables and supply lines
Thanks to the 8-way EtherCAT star distributor, it is possible to set up the branches with as few components as possible, even in the IP 67 world of topology.
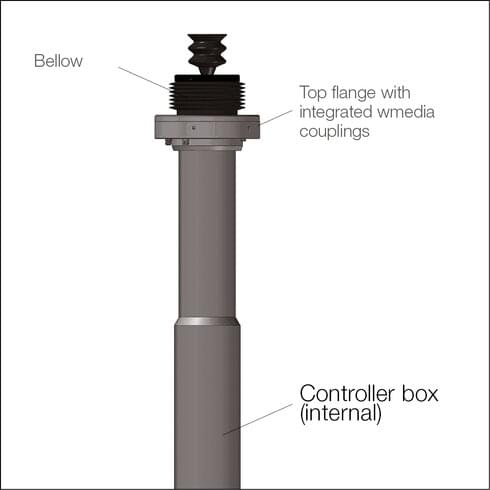
Media interface in the top flange
The top flange is equipped with integrated media couplings for the connection of compressed air, vacuum, electricity and bus data lines. All other required cables and supply lines to the devices in the RVA element are arranged inside the housing of the element so that no pipes have to be laid outside the RVA element.
Bellow
To protect the spiral hose for the supply of compressed air and the vacuum for the workpiece support.
Controller box
The controller box contains pneumatic valves for controlling the compressed air and vacuum. For active RVA elements, the controller box contains the I/Os for the valves, sensors, actuator and the connection for the bus data line.
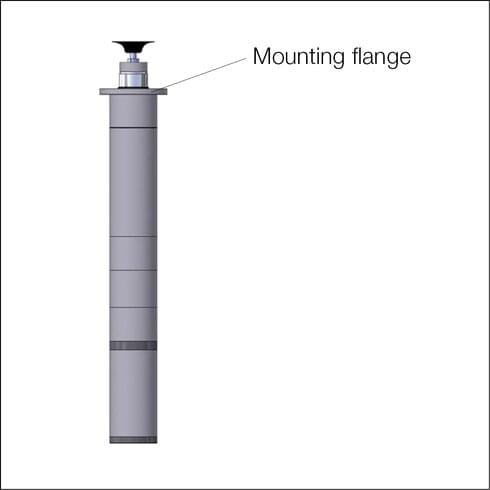
Flange equipment
• 4 fixing screws M8
• Centring diameter 150 mm with fit f7
• Index pin for position orientation
• 2 connecting sockets for electrical equipment/data bus
• 2 coupling nipples for pneumatics and vacuum


Flexible Clamping and Supporting Systems
High precision
The use of precision components for both, the mechanical parts as well as for the electrical, electronic and air flow elements yields a positioning precision (with active elements) of ± 0.05 mm with a repeatability of ± 0.02 mm.
Easy installation
All control and/or drive elements (linear drive for active elements) are integrated into the RVA element. All required media are supplied through suitable connectors or coupling elements, that are arranged at the bottom of the flange.
The correct installation position is guaranteed through the use of mechanical elements that ensure that all contacts are automatically made the elements are set into the appropriate location holes.
High flexibility
RVA elements are axial adjustable. This facilitates the customer- and workpiece-specific design of an FSS clamping system. The individual elements are set using a control system that is matched to the RVA elements.
High process safety
RVA elements are basically configured according to the fail-safe principle. In addition to safety, this also saves energy since after positioning, the piston rods are clamped by spring force and no further energy is required. Electrical energy and/or compressed air is needed only to release the elements.
Easy maintenance
RVA elements are perfectly protected against almost every known external influence due to material composition and the working environment.
Even the standard version complies with protection class IP53. Higher requirements can be met through adaptations. As a result of customer and application-specific adaptations, almost all faults are eliminated and the recommended maintenance cycles are kept to a minimum.
Assembly and disassembly is extremely easy and fast thanks to the media interface below the flange.
High load capacity
Due to the high precision and stability of the individual components and the tried and tested clamping sleeve, the RVA elements provide very strong support force and total stability.
Low energy demand
As soon as the piston is clamped (using spring force), no more energy is needed. Only the vacuum function requires the vacuum generation function to be switched on occasionally when the workpiece is “clamped”.

An FSS clamping fixture consists of a multitude of individual active or passive RVA elements mounted to the required brackets by means of a flange.
The special design principle allows the individual elements to be arranged very closely to one another. These configuration options allow for a use of the FSS clamping system also for those workpieces which, due to their structures, must be supported at as many locations as possible or which depend on narrowly arranged RVA elements due to their reduced dimensions.
The distance and arrangement of the RVA elements is defined depending on the workpieces, the required clamping area and the RVA elements used by each project.
Accessories
FSS clamping fixtures are also designed as complete functional units and can therefore be supplied with any required accessory devices and elements.
These are for example:
• Workpiece positioning elements
• Compressed air generator
• Vacuum generator
• Different vacuum pads depending on material and surface structure
• Deflection heads for vacuum pads (90°, 45° etc.)


Take advantage of the free benefits of our login area:
- CAD data download
- Download operating instructions
Welcome back! Log in to your already existing user account.